
News
New master degree programme in Civil Engineering - Climate change adaptation
A new curriculum in Climate Change Adaptation will be activated for the master degree programme in Civil Engineering at the University of Bologna. Details on the master are given at https://corsi.unibo.it/2cycle/CivilEngineering and https://corsi.unibo.it/2cycle/CivilEngineering/overview (beware: the new curriculum is not yet listed there, the official web site is under construction).
Lecture notes for Climate Change Adaptation (Floods and Water Resources in a Changing Climate) 2024

Climate Change Adaptation (Floods and Water Resources in a Changing Climate for student of physics) is concentrating on strategies and actions to mitigate the impact of climate change on society, with a particular focus on water. The course will be taught with 48 hours of frontal teaching, including lectures given by the teacher and exercises developed by collaborative work by students and the teacher. The purpose of the course is to provide an overview of modern techniques for designing climate resilient environmental systems in the presence of human impact.
Lecture notes for Science of Climate Change and Climate Actions 2024

"Science of Climate Change and Climate Actions" is a soft skill course at the University of Bologna. It will be taught in English for a total of 24 hours (3 credits) in the second semester, by me and other expert colleagues. Details are given here. Access is given to a maximum number of 200 students. The study plan is as follows:
Lecture notes for Harbour Engineering 2024

The course on Harbour Engineering focuses on design of harbors and coast management. The part of course that I am teaching counts 32 hours of lectures. The teacher will make extensive use of interactivity, with the options illustrated below.
Floods: Ten concepts to get better protected

Floods often call people and disaster management by surprise. A list of recent floods shows that inundations are the reason of increasing concern. The list of floods in Italy (in Italian) indicates that 50 victims were reported from 2021 to 2022. An example of a flood that took people by surprise is the event that occurred in Germany during the summer 2021.
Degree and Ph.D. opportunities at Unibo

The Department of Civil, Chemical, Environmental and Material Engineering at the University of Bologna, where I teach and work as a researcher, offers several opportunities to foreign students. I believe studying in Bologna and Ravenna (where the University of Bologna has a campus and where I am teaching) is a great experience for a foreign student.
Degree programmes
If you are interested in degree programs (bachelor and master) offered by my Department, please refer to the following link:
Tutorials Mountain River Training M - 2023-2024

Web site providing information, tutorials and videos for the master degree course on Mountain Rivers Training. The web page is in Italian.
Tutorials of Coastal Engineering - 2023-2024

The course on Coastal Engineering is included in the study plan of the master degree program in Off-shore Engineering at the University of Bologna. The part of course that I am teaching counts 12 hours of lectures. The teacher will make extensive use of interactivity, with the options illustrated below. Lectures include about 4 hours dedicated to solving exercises by using the personal computer, by collaborative work by students and teacher. Students will be kindly asked to bring their own personal computer to solve the exercises.
Lecture notes for "Climate change and global health" - University San Raffaele

"Climate change and global health" (CCGH) is a 12-hour module of the course on "Climate changing and architecture for health" at the University San Raffaele in Milan. I am teaching CCGH for the first time in the fall semester 2023.
The 12 hours of teaching will be delivered through in-presence frontal lectures. the study plan is as follows:
Courses on Climate Change and Adaptation - Spring 2024
Next Spring I am teaching two courses on climate change and adaptation at the University of Bologna. The courses will be delivered in hybrid mode, that is, in physical presence and streaming. In case streaming is not available, video of the lectures will be made promptly available soon after the each lecture is closed.
The courses are:
My presentation at the EGU2024 General Assembly titled "Why the 2022 Po River drought is the worst ever observed"

My presentation at the EGU2024 General Assembly titled "Why the 2022 Po River drought is the worst ever observed" is available for download at the link below.
Thanks for your interest.
Ciao,
Alberto
My presentation at the meeting "80 Years of Hydrology" (Salerno, 23-24 January 2024) titled "Civil protection in Italy: origin, evolution and future perspectives" (in Italian)

My invited presentation (together with Pierluigi Claps and Paola Pagliara) titled "Civil protection in Italy: origin, evolution and future perspectives" (in Italian) at the meeting "80 Years of Hydrology" (Salerno, January 23-24, 2024) is available for download at the link below.
It is a celebration of the contributions by Fabio Rossi and Lino Versace to civil protection.
Thank you for your interest.
Ciao,
Alberto
My live interview (in Italian) at the TRC TV on megaflood predictability

On November 27 I have been live interviewed by the TV channel TRC. The discussion focused on predictability of megafloods, after the publication of the Nature Geoscience paper "Megafloods in Europe can be anticipated from observations in hydrologically similar catchments", authored by Miriam Bertola with a large pool of co-authors.
The interview can be watched here. The video has been kindly provided by TRC Bologna.
Thank you for your interest.
Ciao,
Alberto
My presentation at the International Conference Themes 2023 titled "Long term cycles in hydroclimatic processes: the unresolved enigma of climatic variability"
My presentation "Long term cycles in hydroclimatic processes: the unresolved enigma of climatic variability" at the International Conference Themes 2023 (Venice, November 15, 2023) is available for download at the link below.
Thank you for your interest.
Ciao,
Alberto
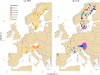
Megafloods in Europe can be anticipated. Paper in Nature Geoscience

The article "Megafloods in Europe can be anticipated from observations in hydrologically similar catchments", authored by Miriam Bertola with a large pool of co-authors, has been published on Nature Geosciences.
Public share full-text access to a view-only version of the paper can be accessed here.
My presentation at the Hydrology Days of the Italian Hydrological Society "Pandemics, geopolitics, economic inflation and water resources management"" (in Italian)

My presentation "Pandemics, geopolitics, economic inflation and water resources management" (in Italian) at the Hydrology Days of the Italian Hydrological Society is available for download at the link below. It's a new interdisciplinary adventure stimulated by the awareness that water resources management is driven by forcings related to political economy.
Thank you for your interest.
Ciao,
Alberto
My poster contribution "Why the 2022 drought in the Po River is the worst ever" (in Italian) at the Hydrology Days of the Italian Hydrological Society
My poster contribution titled "Why the 2022 drought in the Po River is the worst ever" (in Italian) presented at the Hydrology Days of the Italian Hydrological Society is available for download at the link below.
Thanks for your interest!
Best,
Alberto
Article on Nature Italy and press coverage on the 2022 drought along the Po River

Nature Italy published an article by Ginevra Chelli titled "Po river drought in 2022 was the worst of the last two centuries", that comments on the results presented in the paper ""Why the 2022 Po River drought is the worst in the past two centuries" published in Science Advances, by myself, Hung Nguyen, Sara Rubinetti, Serena Ceola, Stefano Galelli, Angelo Rubino and Davide Zanchettin.
The paper was widely commented by the press. Please see:
Paper on Science Advances: Why the 2022 Po River drought is the worst in the past two centuries

The paper "Why the 2022 Po River drought is the worst in the past two centuries" by myself, Hung Nguyen, Sara Rubinetti, Serena Ceola, Stefano Galelli, Angelo Rubino and Davide Zanchettin has been just published by Science Advances. The paper is open access.
The study focuses on the extreme drought that in 2022 hit the Po River basin and attempts to understand its drivers.
Research project Advanced Grant financed by the Italian Science Fund "Stochastic amplification of climate change into floods and droughts change"

My research proposal titled "Stochastic amplification of climate change into floods and droughts change" has been financed by the Italian Science Fund within the programme "Advanced Grant". The grant is worth 1.383.631,00 €.
- 58153 views